EleonoraCapocasa - 18:29, Friday 07 August 2020 (2149)
WFS RF rotation matrix implemented in DGS
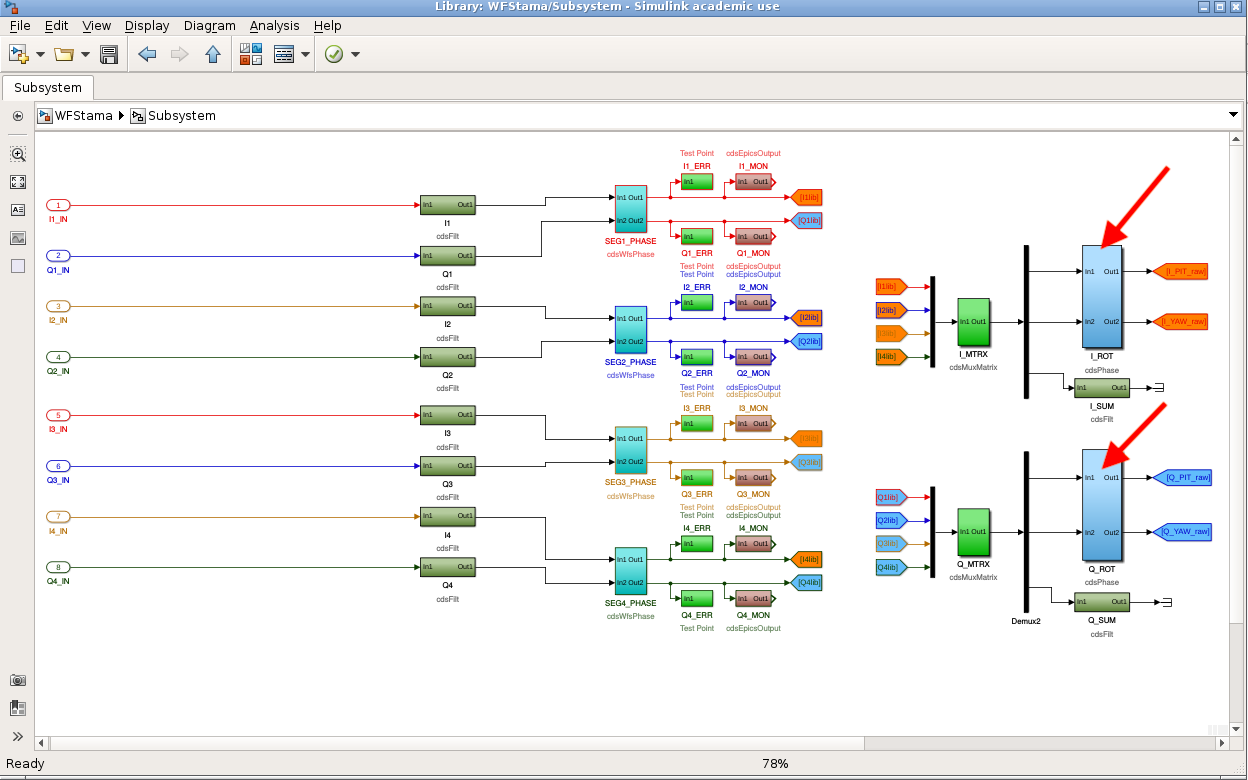
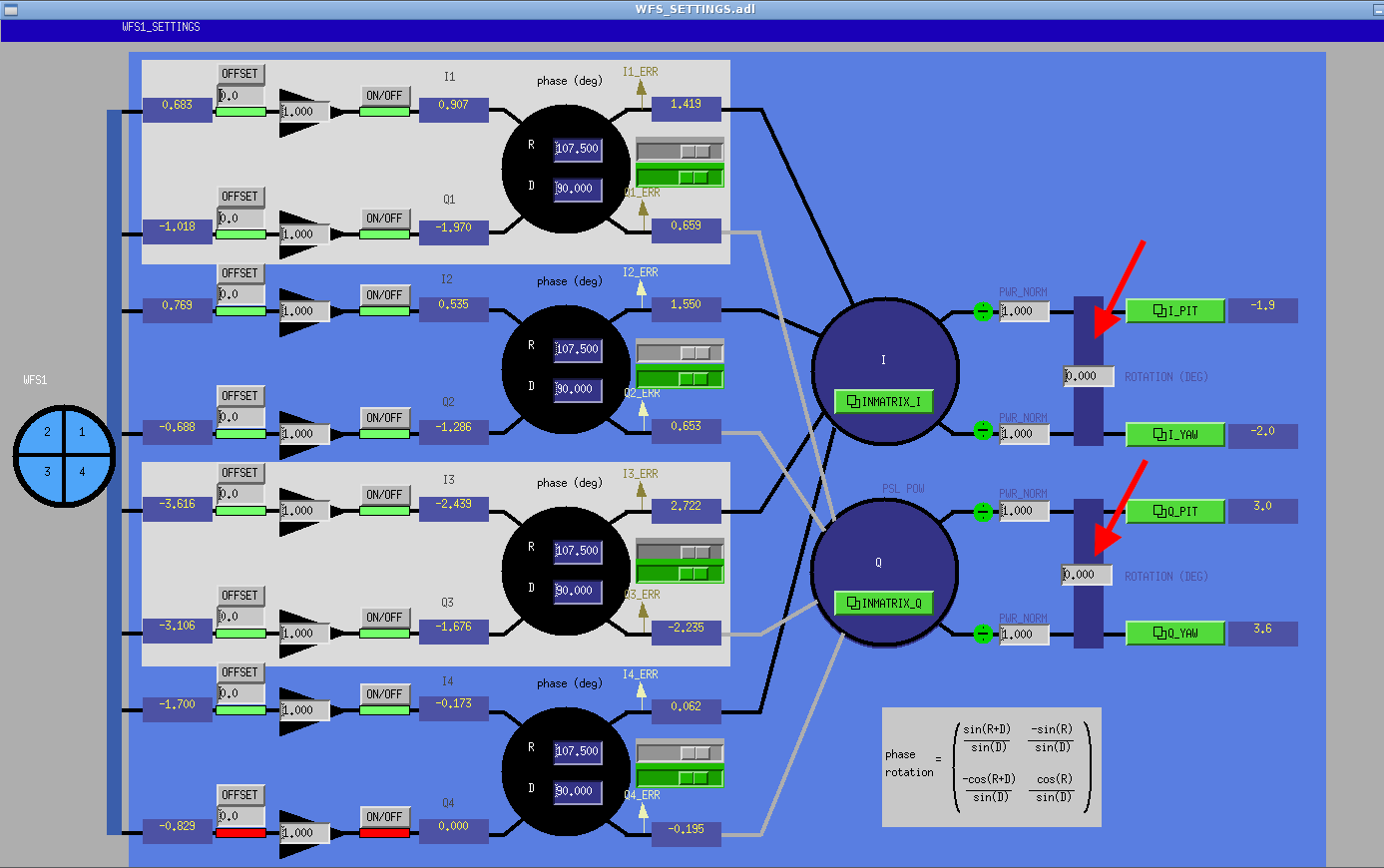
I have added a rotation matrix to combine pitch and yaw WFS RF signals in order to compensate a possible physical rotation of the sensor (see entry #2144).
See attached the screenshot for model (pic1) and medm (pic2) modification. For the moment I didn't modify the DC part.
Images attached to this report