EleonoraCapocasa - 10:53, Friday 02 June 2017 (486)
Picomotor remote control interface
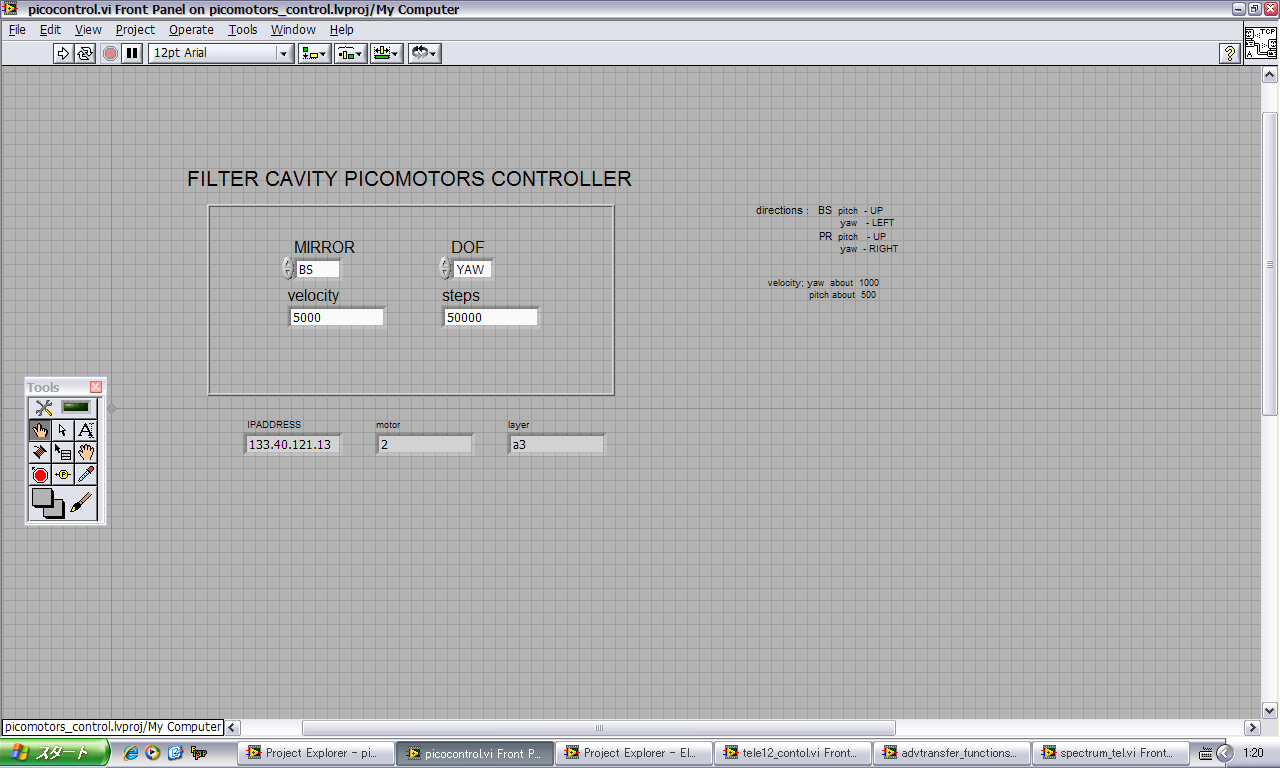
In order to speed up the remote control of picomotors that are largely used for the beam aligment, I wrote a custum vi which avoid to inserting each time command lines to select drivers, motors, velocity and steps (pic 1). The vi (picocontrol.vi) is in a dedicated labview project (C:Digital/picomotor_control.lvproj)
We remark that BS yaw picomotor still doesn't work.
The final configuration for the picomotors control is
CONTROLLER 133.40.121.13
A1
- PITCH BS
- YAW BS
- empty
A2
- PITCH INPUT
- YAW INPUT
- empty
A3
- PITCH 2" TELESCOPE
- YAW 2" TELESCOPE
- LENGTH 2" TELESCOPE
CONTROLLER 133.40.121.14
A1
- PITCH PR
- YAW PR
- PITCH SM1
A2
- PITCH SM2
- YAW SM2
- YAW SM1
CONTROLLER 133.40.121.15
A1
- PITCH END
- YAW END
- empty
Where 1, 2, 3 correspondes to motor 0, motor 1 and motor 2
Images attached to this report