Pierre Prat - 15:37, Tuesday 10 April 2018 (736)
Comparison between the old and the new laser frequency servos
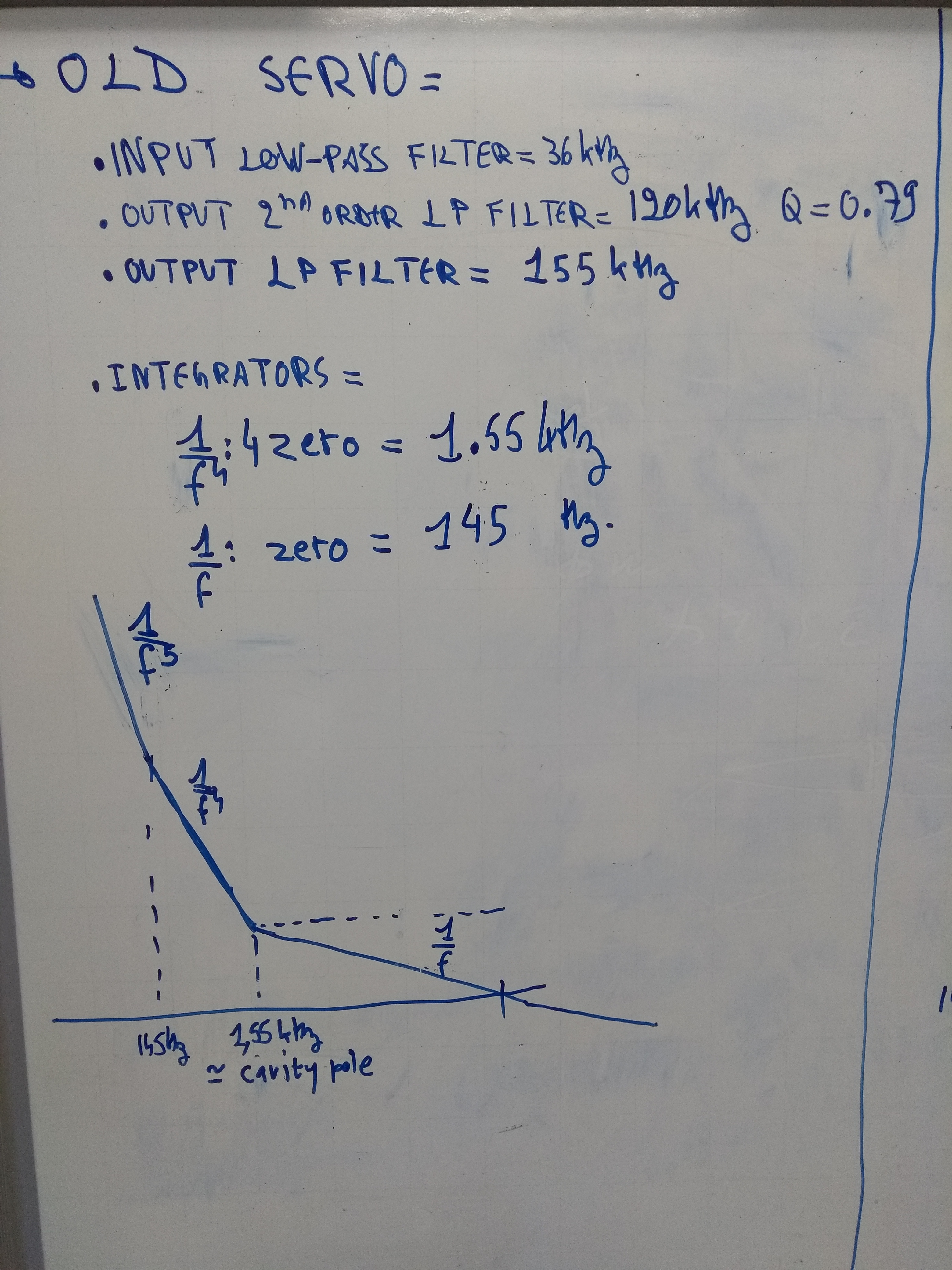
=> Old servo: oldservo.jpg
* INPUT LP Filter: 36kHz
* OUTPUT 2nd order LP filter: 120 kHz - Q = 0.79
* OUTPUT LP filter: 155 kHz
* pole (LP filter R54-C54): 145 kHz
* Integrators:
- 1/f^4 : 4 zeros @ 1.55kHz
- 1/f : 1 zero @ 145 Hz
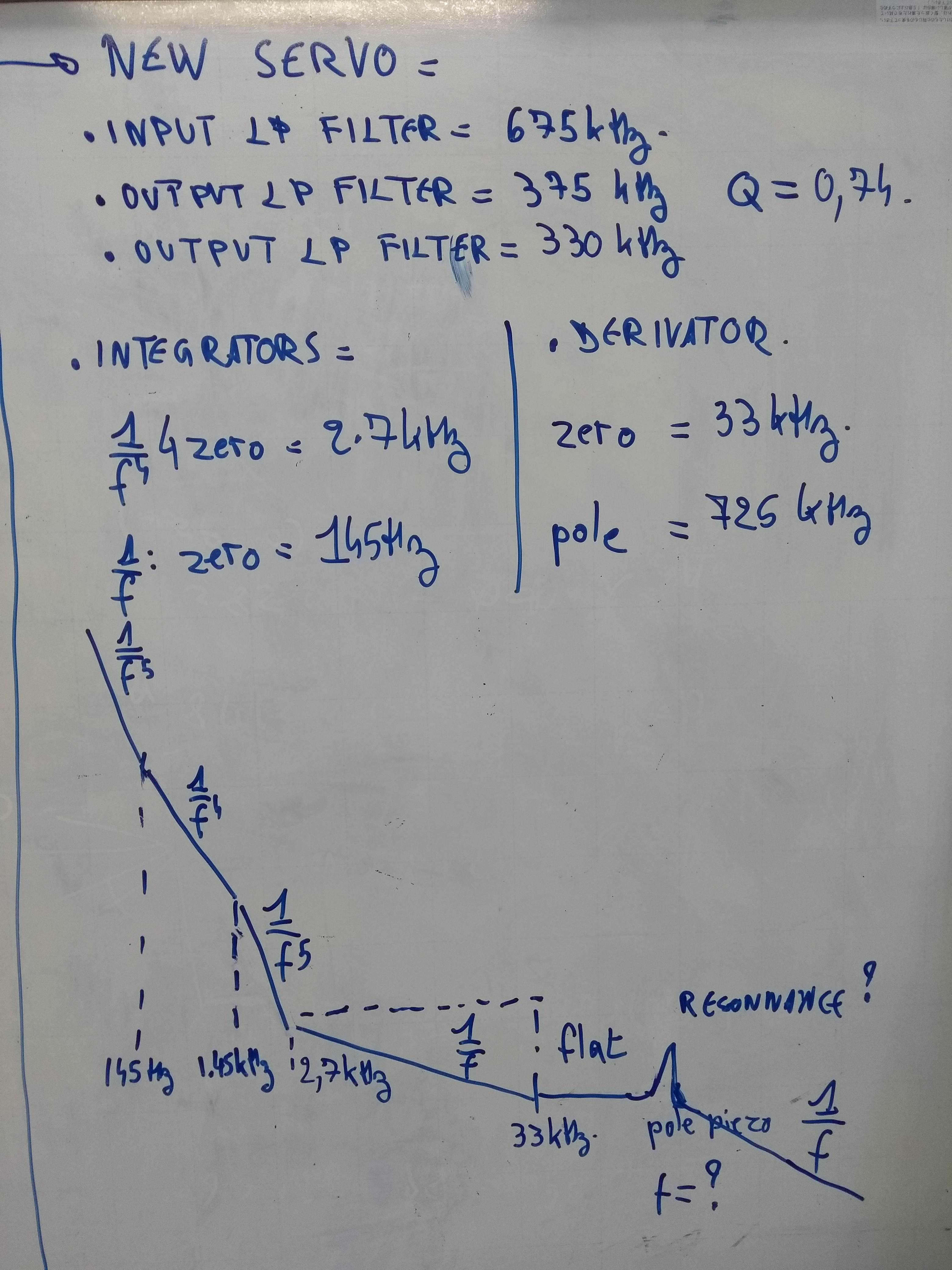
=> New servo: newservo.jpg
* INPUT LP Filter: 675kHz
* OUTPUT 2nd order LP filter: 375 kHz - Q = 0.74
* OUTPUT LP Filter: 330 kHz kHz
* pole (LP filter R54-C54): 660 kHz
* Integrators:
- 1/f^4 : 4 zeros @ 2.7kHz
- 1/f : 1 zero @ 145 Hz
* Differentiator (added compared to the old version):
- zero: 33 kHz
- pole: 725 kHz
* INPUT LP Filter: 36kHz
* OUTPUT 2nd order LP filter: 120 kHz - Q = 0.79
* OUTPUT LP filter: 155 kHz
* pole (LP filter R54-C54): 145 kHz
* Integrators:
- 1/f^4 : 4 zeros @ 1.55kHz
- 1/f : 1 zero @ 145 Hz
=> New servo: newservo.jpg
* INPUT LP Filter: 675kHz
* OUTPUT 2nd order LP filter: 375 kHz - Q = 0.74
* OUTPUT LP Filter: 330 kHz kHz
* pole (LP filter R54-C54): 660 kHz
* Integrators:
- 1/f^4 : 4 zeros @ 2.7kHz
- 1/f : 1 zero @ 145 Hz
* Differentiator (added compared to the old version):
- zero: 33 kHz
- pole: 725 kHz
Images attached to this report
Comments related to this report
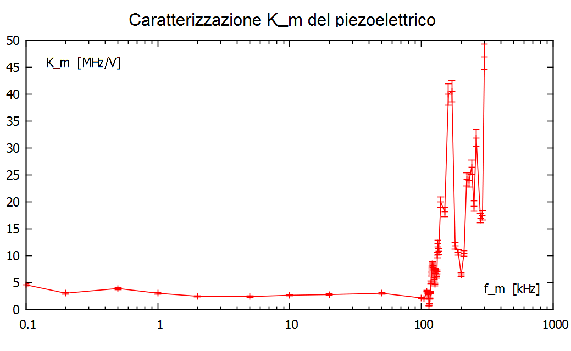
Following the discussion we had offline, I upload a measurement that was done few years ago when I was in the Padova group. The measurement is a characterization of the laser PZT gain as function of the frequency.
The laser is a 1W Mephisto laser from Coherent.
Images attached to this comment