After the failed attemp to stably lock the cavity with the new servo (reported here), Pierre has modified the servo by shifting the differentatior. This was done in order to mitigate the effect of the piezo resonances:
Changes:
-zero : 32.8 kHz -> 88 kHz
-pole : 732 kHz -> 380 kHz
We have tried to lock the cavity with this modified servo. Here what we observed:
1) Thurday evening and Friday afternoon we could stably lock the cavity with the new servo (gain between 4 and 5). It corresponds to a UGF of about 14 kHz and with a large phase margin of 55°. In this configuration the error signal is much smaller than with the old servo.
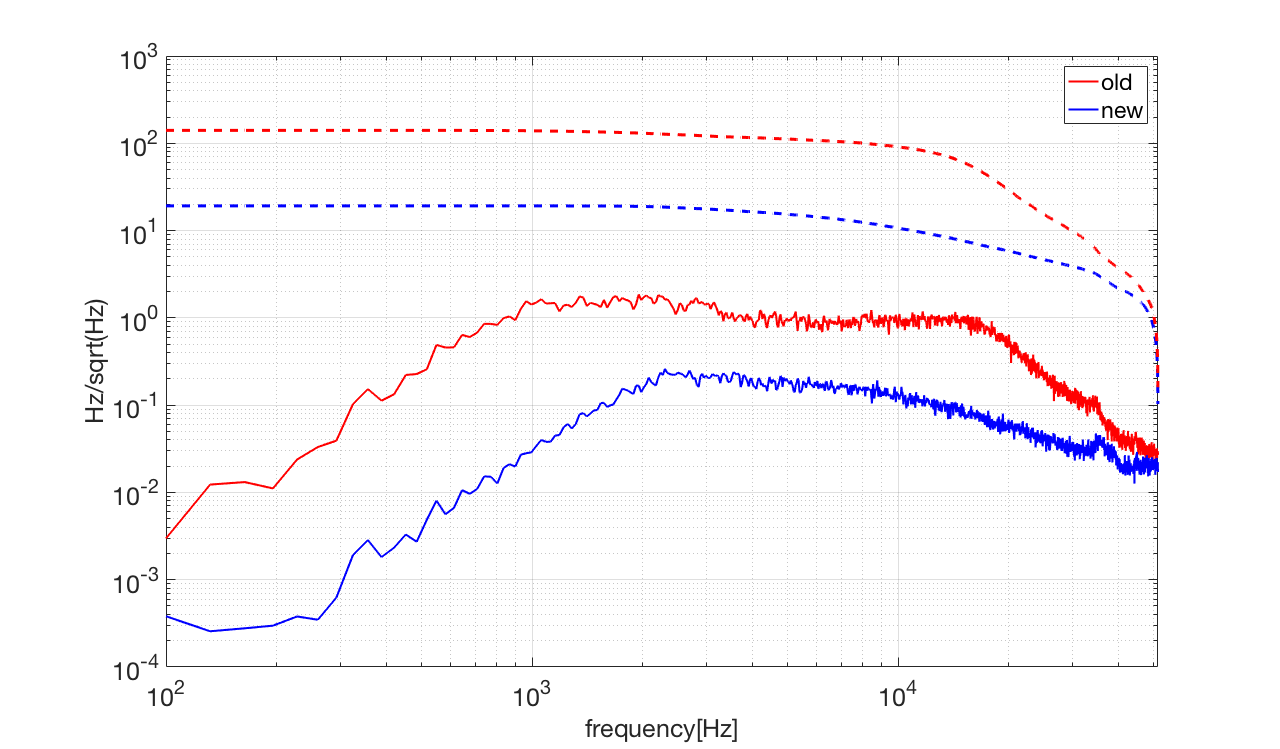
The comparison between the spectrum of the error signal with the new and the old servo is plotted in pic 1 and seems remarkable. (About a factor 7 in the rms)
The calibration used is 385 Hz/V (as here). We found a rms of 140 Hz for the old servo which is compatible with the previouse observation.
2) Friday morning and sometimes in the afternoon the servo showed a strong oscillation at about 300 kHz (similar to that observed before Pierre's modification). We remarked that the oscillation is sometimes triggered when the lock is reacquired. (During the long lock of yesterday and this afternoon the cavity mirrors were very stable, while this morning when we observed the oscillation they were moving more).
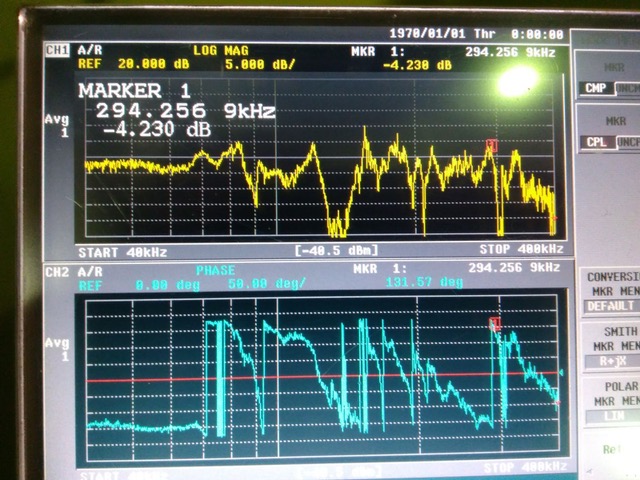
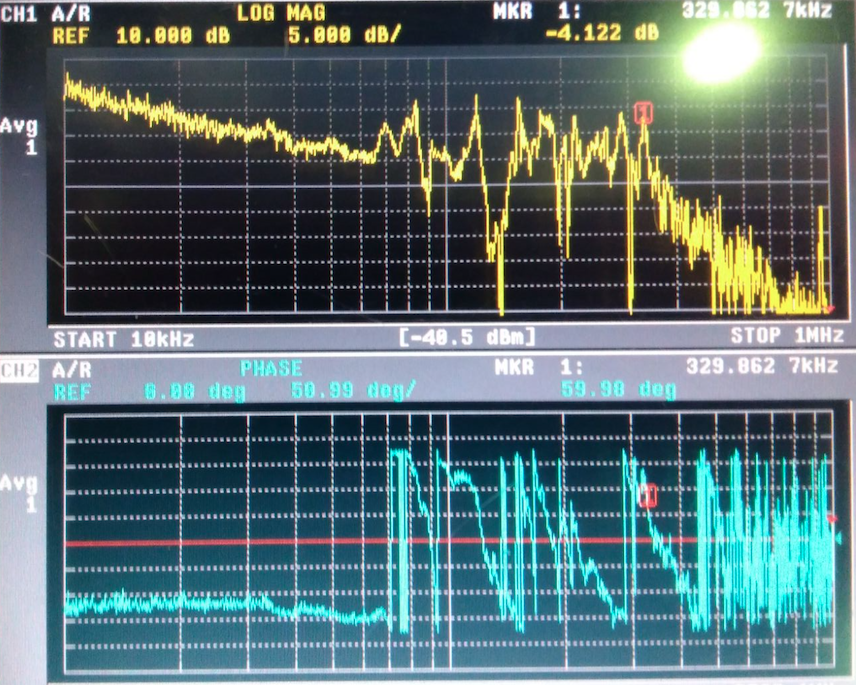
3) With the new servo, we have masured the openlooop TF at high frequency and we have observed the presence of many peaks between 60 kHz and 300 kHz, some of them (in particular that at 300 kHz) have amplitude close to 1 and small phase margin. The origin of this peak is not clear (Piezo resonances?, structure in the optical TF?). Pic. 2-3 show the open loop tf between 40khz and 400 kHz and betwenn 10 kHz and 1MHz, respectively
The TF at high frequency has been aquired with the network analyzer from which we cannot save the data. I have manually extracted the data from the first TF (40-400kHz) of that in order to try to fit them.
They can be found here
NEXT STEP
We are currently studying a modification of the servo in order to improve the stability.