NAOJ GW Elog Logbook 3.2

Participants: Yuhang, Eleonora
We have tried to recover the cavity alignment after TAMA blackout.
1) We have reset all the local controls. For the input and end mirror we have reset the SR560 which filters the error signals (2nd order lowpass filter with cut-off frequency 100 Hz and amplification factor 100)
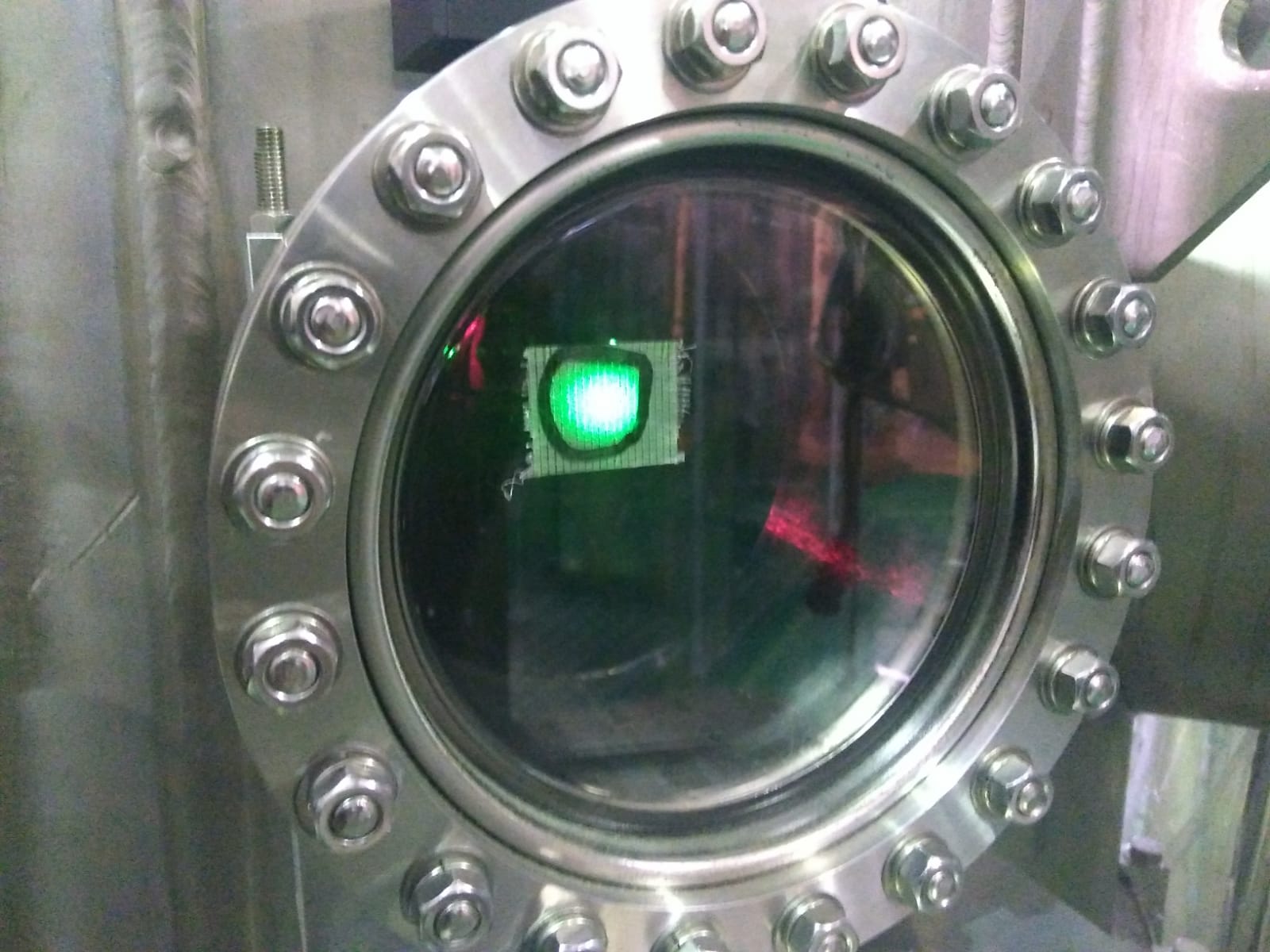
2) We observed that the reference out of BS chamber, accunting for PR position, was very far from the good position, especially in pitch. Since the local control range was too small, we used picomotors to recover it. Pic 2 shows the reference after moving PR.
3) We had to move also the BS picomotors to recover the good position of the beam on the two in vacuum targets and make the beam to reach the screen after the end mirror, used as a reference for the alignement.
4) At this point we aligned the input mirror in order to have the reflected beam superposed on the input beam.
5) The last step is to align the end mirror. The standard procedure, when no flashes are visible, consists in raising the second target and making the beam to pass through its hole. Than the end mirorr is aligned by making the reflected beam to hit the hole of the target from the back. The reflection can be observed by monitoring the rear side of the target. Unfortunatly the range of the local control was not enough and the end mirror picomotor got stuck in yaw so we were not able to align the end mirror and to see any flash. Pic 2 shows the rear side of the second target, with the reflected beam offset in yaw with respect to the hole of few cm.
SOME DETAIL ON END MIRROR PICOMOTOR: We used both the computer and the joystick to move it. Pitch was always fine. Yaw was moving at the beginning but after a while it got stuck. We tried to switch the driver on and off many times, to swap the channels but it didn't solve the problem.
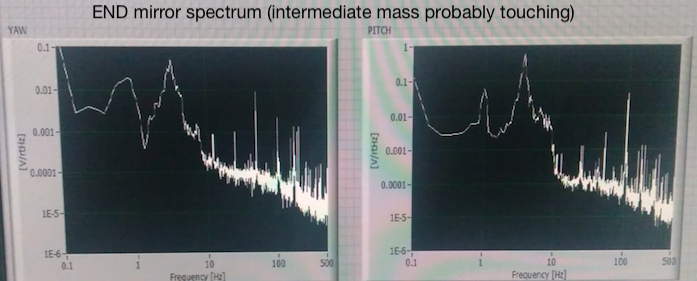
Since we moved the end picomotor in pitch we observed a higher movement of the mirror with typical peaks in the spectrum which are not normal mode of the suspension (see pic 3). It made me suspect that the intermediate mass is touching the frame of the damping magnets. We already observed something similar in PR suspension (see entry 239 and confront the spectra).
Even if the damping loop is effective in reducing the mirror motion, this should be possibliy solved.
HOW TO GO ON: according to our experience, picomotors which are stuck are likey to start working again after a while. So we will try to move it again in the next days, before considering to open the chamber.
Yesterday 27 Aug we made another try to move end mirror picomotors. We easily recovered the condition when the beam passing through the hole of the second target was reflected by the end mirror on the back of the target, but displaced few cm in yaw from the center. Unfortunately the yaw picomotor is still stuck and we could not recover the alignement. We are probabably left with no other option that opening the chamber.