NAOJ GW Elog Logbook 3.2
Displaying report 1-1 of 1.
EmilSchreiber, YuhangZhao - 10:06, Tuesday 08 May 2018 (759)
Mach-Zehnder control loop design and testing
We finished and tested the electronics for the Mach-Zehnder controller. The loop performs well with a control bandwidth of 3.2kHz. We will need to further investigate whether the resulting amplitude stability of the transmitted green beam is sufficient.
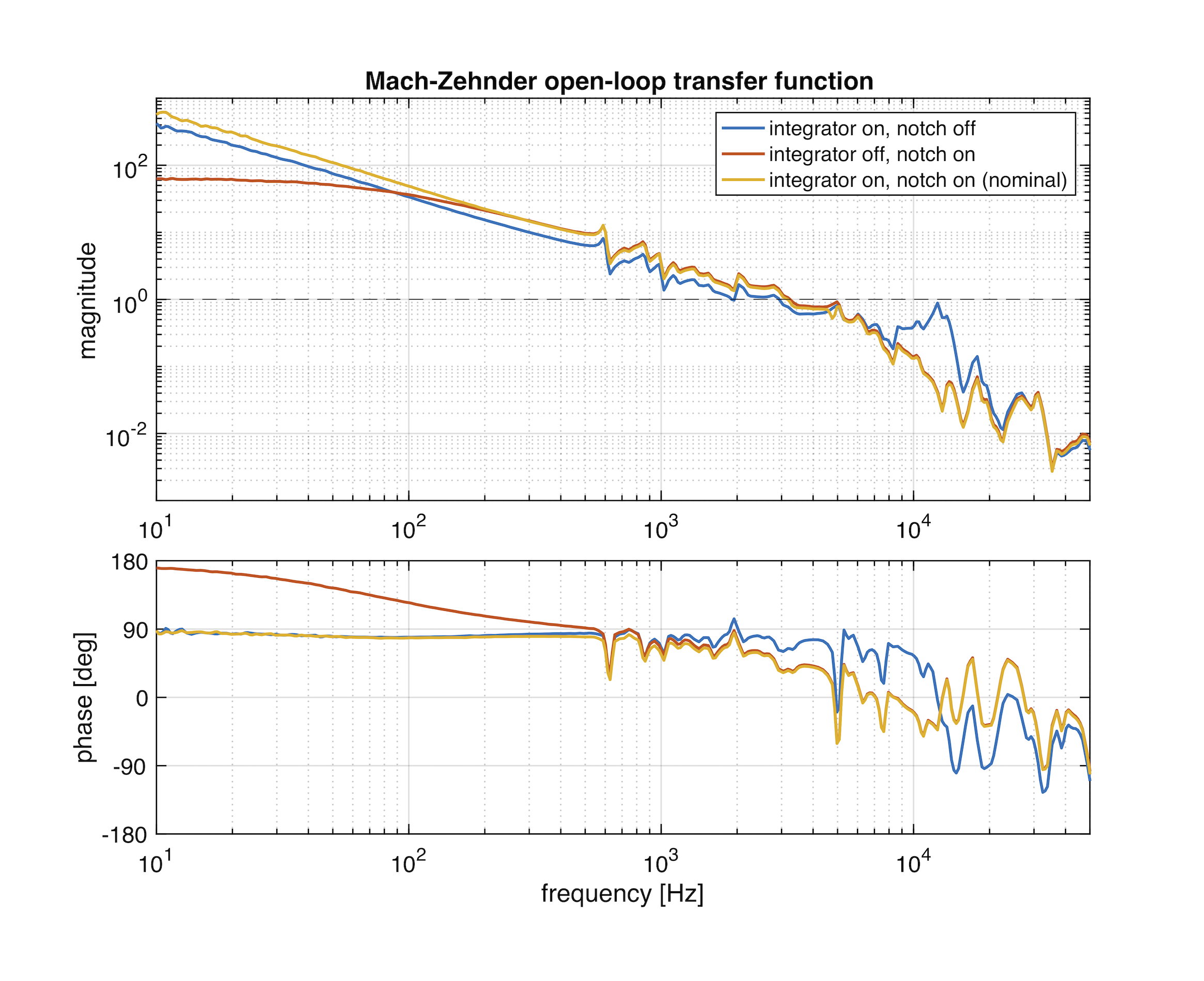
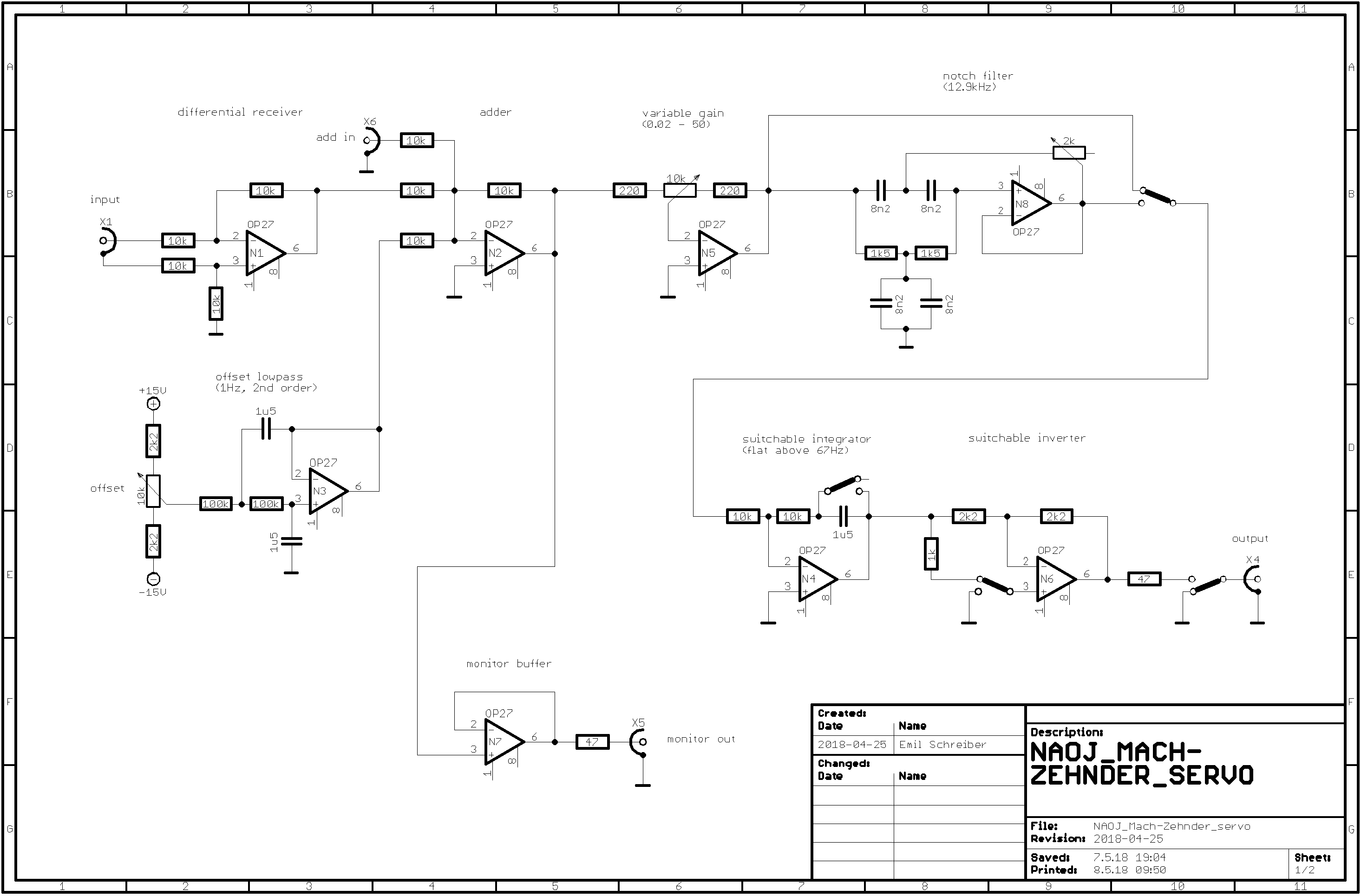
The servo electronics are designed to give a simple 1/f open-loop transfer function. We use the fact that the PZT driver already includes a low-pass filter with a corner frequency of 77Hz (see entry 585). Additionally, the servo includes a low-frequency integrator to give infinite gain at DC, which can be switched off for lock acquisition.
We found that a mechanical resonance at 12.4kHz was limiting the achievable unity-gain frequency. Including a low-Q notch filter for this frequency allows for a slightly higher UGF, but it is then limited by another mechanical feature at 4.9kHz. There is yet another instability at around 600Hz, but this only occurs if the gain is set too low and can thus be completely avoided.
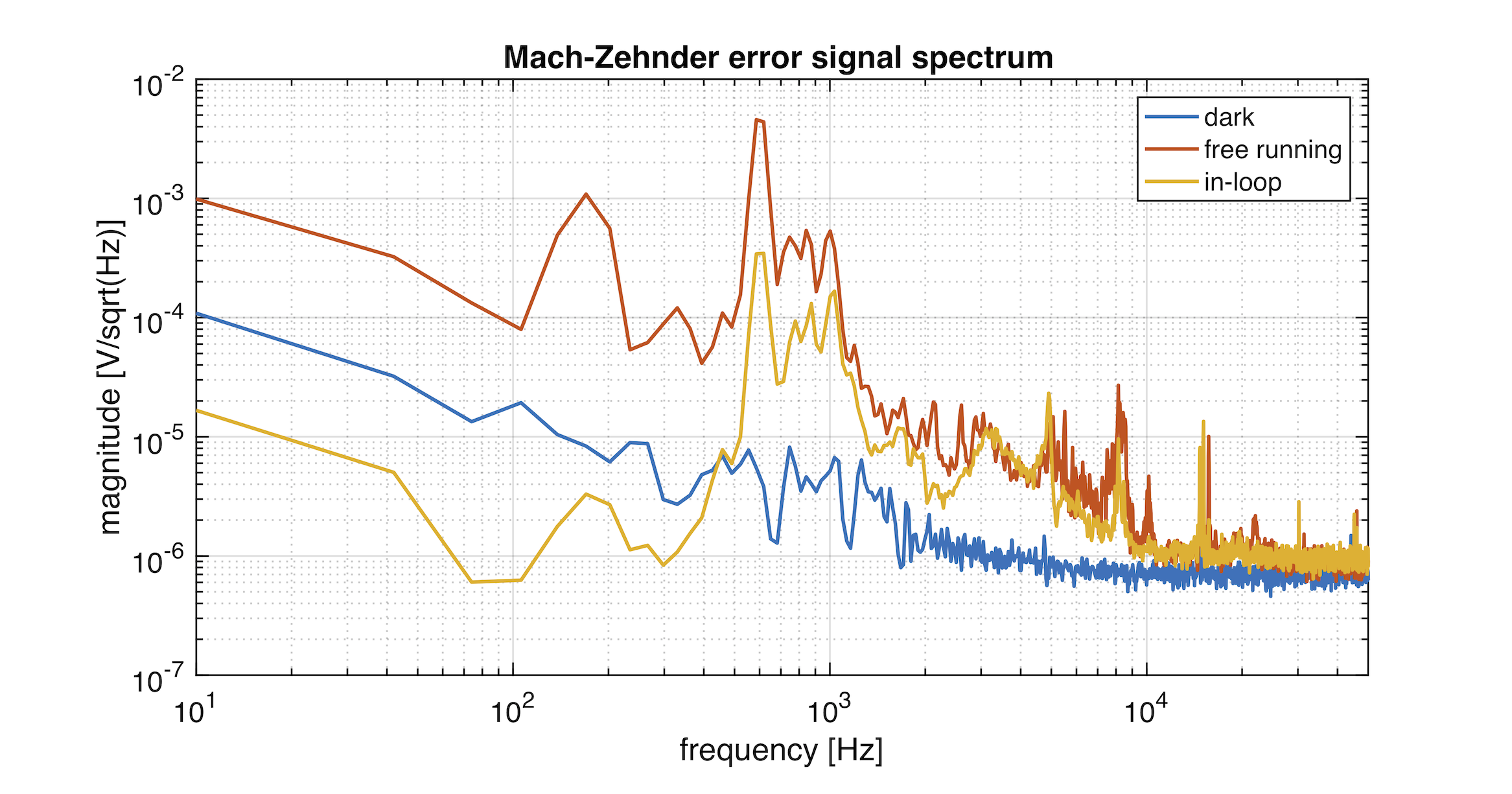
I measured noise spectra of the error signal for the in-loop case, free running noise (set to the same operating point by hand) and dark noise (green beam path blocked). The residual in-loop noise is dominated by features at 600-1000Hz. At these frequencies there is currently not much loop gain to suppress the noise. The dark noise is surprisingly high, in particular at low frequencies. We will have to look into this further.
Things to check:
- Can we identify the 4.9kHz resonance and maybe reduce it mechanically (e.g. by tightening screws)?
- Are the 600Hz noise features actual amplitude fluctuations coming from the SHG or are they added by the Mach-Zehnder? (This can be tested by putting the PD before Mach-Zehnder.)
- Is the low-frequency dark noise caused by ambient light or electronics? Can it be reduced?
- Is the low-frequency dark noise caused by ambient light or electronics? Can it be reduced?We finished and tested the electronics for the Mach-Zehnder controller. The loop performs well with a control bandwidth of 3.2kHz. We will need to further investigate whether the resulting amplitude stability of the transmitted green beam is sufficient.
ÂÂ
The servo electronics are designed to give a simple 1/f open-loop transfer function. We use the fact that the PZT driver already includes a low-pass filter with a corner frequency of 77Hz. Additionally, the servo includes a low-frequency integrator to give infinite gain at DC, which can be switched off for lock acquisition.
ÂÂ
We found that a mechanical resonance at 12.4kHz was limiting the achievable unity-gain frequency. Including a low-Q notch filter for this frequency allows for a slightly higher UGF, but it is then limited by another mechanical feature at 4.9kHz. There is yet another instability at around 600Hz, but this only occurs if the gain is set too low and can thus be completely avoided.
ÂÂ
I measured noise spectra of the error signal for the in-loop case, free running noise (set to the same operating point by hand) and dark noise (green beam path blocked). The residual in-loop noise is dominated by features at 600-1000Hz. At these frequencies there is currently not much loop gain to suppress the noise. The dark noise is surprisingly high, in particular at low frequencies. We will have to look into this further.
ÂÂ
ÂÂ
Things to check:
- Can we identify the 4.9kHz resonance and maybe reduce it mechanically (e.g. by tightening screws)?
- Are the 600Hz noise features actual amplitude fluctuations coming from the SHG or are they added by the Mach-Zehnder? (This can be tested by putting the PD before Mach-Zehnder.)
- Is the low-frequency dark noise caused by ambient light or electronics? Can it be reduced?
Images attached to this report